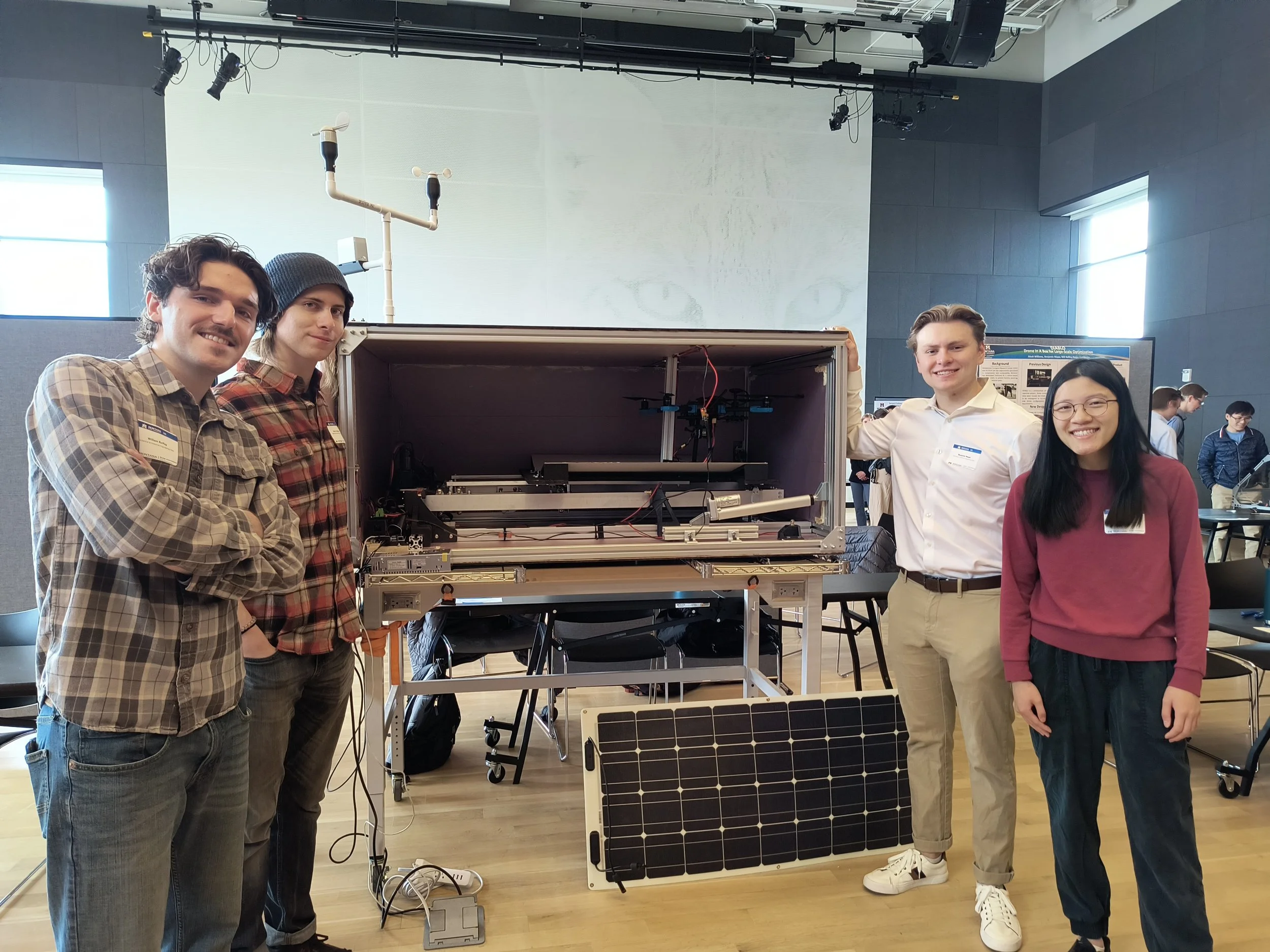
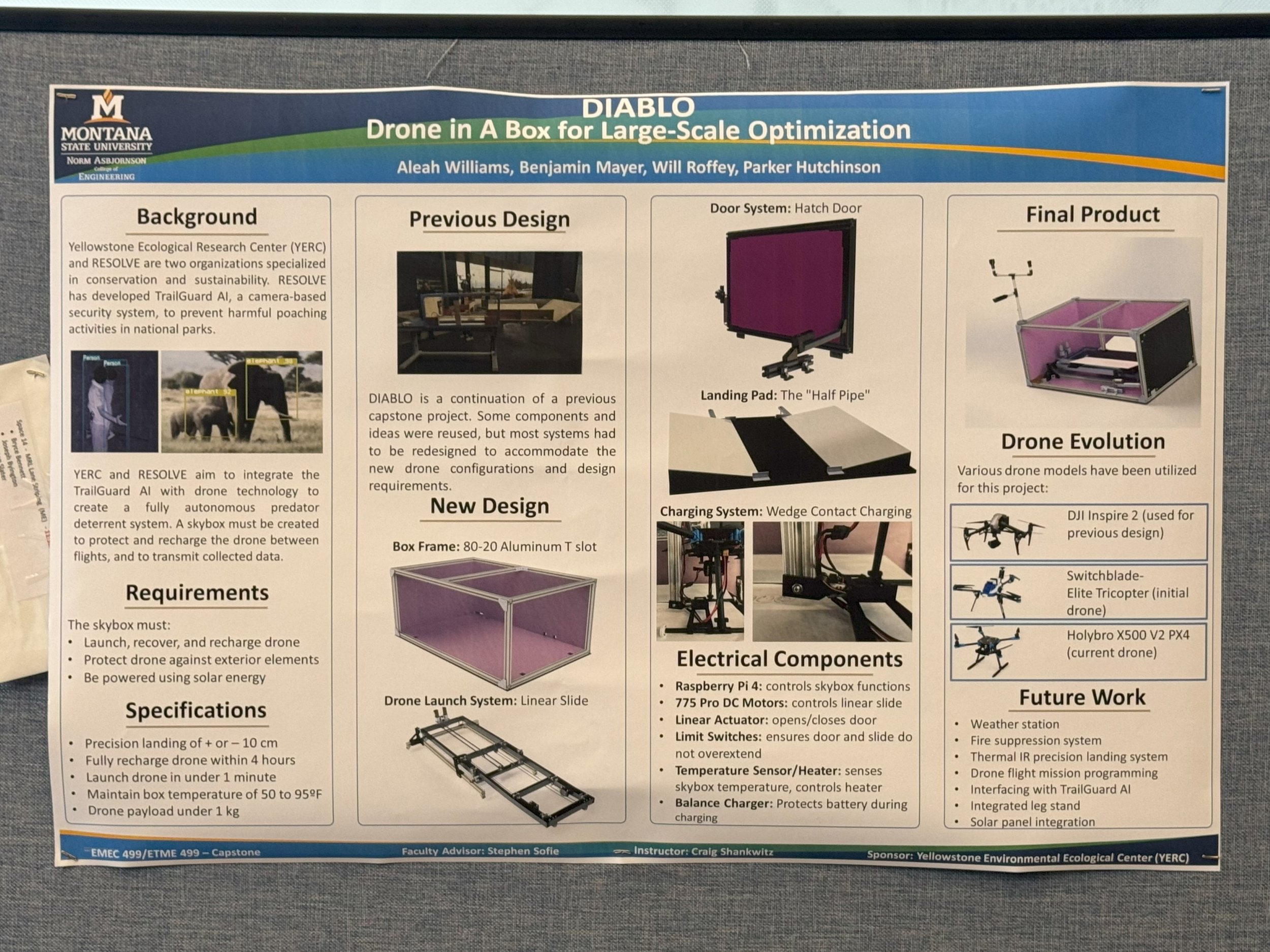
DIABLO Capstone Team Presents their Prototype
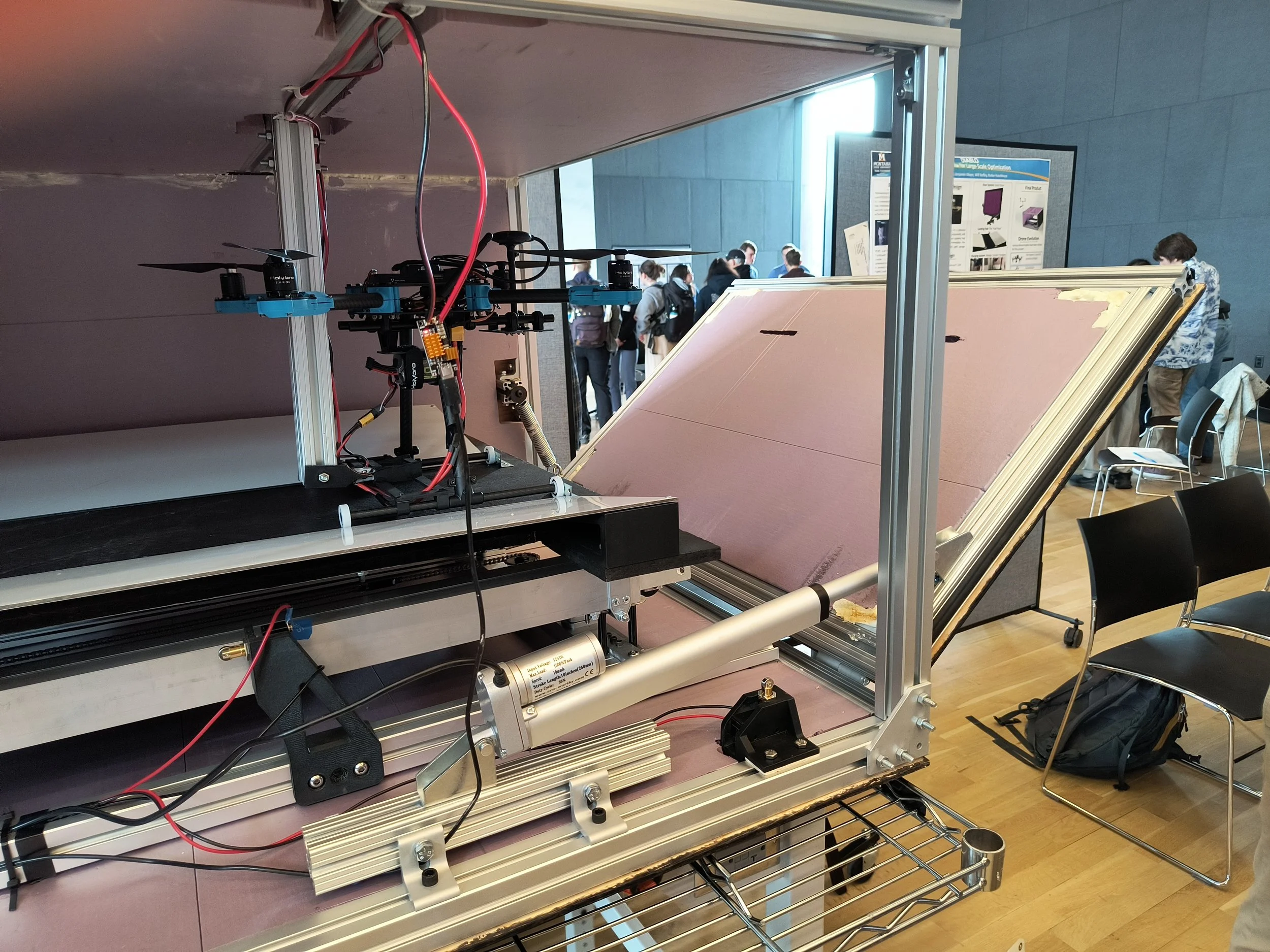
Last week, the DIABLO, or Drone In A Box for Large-scale Optimization, capstone team presented their final prototype for a fully autonomous ‘skybox’ housing at the Norm Asbjornson College of Engineering Capstone Design Fair. The team, composed of Montana State University (MSU) senior engineering students Aleah Williams, Benjamin Mayer, Will Roffey, and Parker Hutchinson, has been working on this YERC-sponsored project since the fall, with the goal of creating an autonomous housing for storing and deploying a predator deterrence drone to be activated using RESOLVE’s TrailGuard AI software, an anti-poaching, camera-based security system that detects predators using trail cameras. During deployment, the skybox opens a hatch door, allowing for a linear slide to move the drone landing pad outside for takeoff. During landing, a “half-pipe” landing pad design allows for the drone to seamlessly return to proper alignment for charging before the linear slide pulls the landing pad back inside the skybox. As the slide pulls the landing pad inside, the drone comes in contact with its stationary charger, and the hatch door shuts, sealing the interior from any severe weather outside. Additionally, the housing contains a weather monitoring system, monitoring external conditions and preventing deployment if they are not safe for the drone.